船舶錨機(jī)現(xiàn)場(chǎng)采用了庫(kù)馬克ES580驅(qū)動(dòng)器和三相異步電機(jī)控制,主要驅(qū)動(dòng)船用錨機(jī)在開(kāi)船停船階段起錨,落錨動(dòng)作。根據(jù)控制工藝,采用多段速和起重專用程序控制。
船舶錨機(jī)是一種大甲板機(jī)械設(shè)備,用來(lái)起錨和拋錨的機(jī)械,是必不可缺的,其作用在于保證船舶安全停泊于水面、系泊于碼頭等位置。

錨機(jī)的分類
|
驅(qū)動(dòng)方式 |
蒸汽錨機(jī) | 電動(dòng)錨機(jī) | 電動(dòng)-液壓錨機(jī) | 手動(dòng)錨機(jī) |
| 布置方式 | 普通型(整體)錨機(jī) |
單側(cè)型(獨(dú)立)錨機(jī) |
聯(lián)接型(起錨、系泊多用途)錨機(jī) |
|
| 制動(dòng)方式 | 裝有一般制動(dòng)器的錨機(jī) | 裝有自制動(dòng)器的錨機(jī) |
|
|
| 錨鏈輪軸線位置 | 臥式錨機(jī) | 立式錨機(jī) |
|
|
錨機(jī)的特點(diǎn)
1、手動(dòng)錨機(jī):以人作動(dòng)力,用于錨重不超過(guò)25kg的船舶,應(yīng)有防止手柄打傷人的措施。
2、蒸汽錨機(jī):以蒸汽為動(dòng)力,無(wú)引起火災(zāi)的危險(xiǎn),特別適用于油船。但效率低、體積大、操作管理麻煩,在嚴(yán)寒冬天使用時(shí),要有較長(zhǎng)的暖機(jī)時(shí)間,,并要注意泄放殘水。
3、電動(dòng)錨機(jī):直流電動(dòng)錨機(jī):使用性能好、效率高,但初置費(fèi)用高,換相器易產(chǎn)生 火花,維護(hù)工作量大;交流電動(dòng)錨機(jī):調(diào)速性能差,通常只能有級(jí)變速(電機(jī)變極或利用減速傳動(dòng)機(jī)構(gòu)變檔)。但成本較低、維護(hù)保養(yǎng)簡(jiǎn)便,使用最普遍。
4、液壓錨機(jī):亦稱電動(dòng)液壓錨機(jī),由交流電機(jī)間接驅(qū)動(dòng),其速度和功率可在廣泛范圍內(nèi)實(shí)現(xiàn)無(wú)級(jí)調(diào)節(jié),性能良好。在新建船舶上使用已日漸增多。
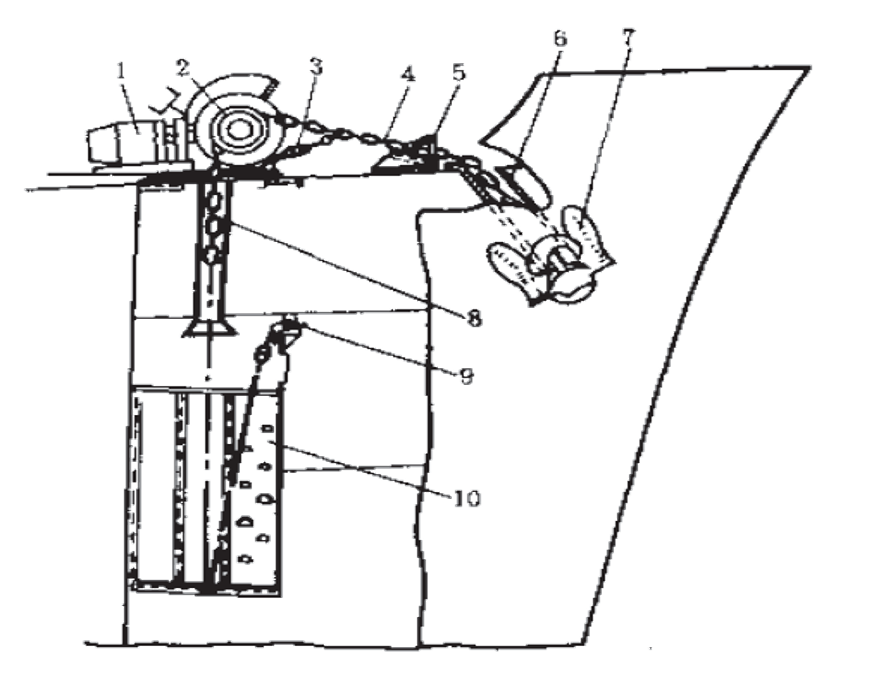
錨機(jī)是船舶錨設(shè)備的其中一個(gè)機(jī)械設(shè)備。
通常錨機(jī)在錨設(shè)備的位置與錨設(shè)備的布置構(gòu)成:
1-電動(dòng)機(jī) 2-錨機(jī) 3-擎鏈鉤
4-錨鏈 5-擎鏈器 6-錨鏈筒
7-錨 8-錨鏈管 9-棄鏈器
10-錨鏈艙
正常起錨過(guò)程:
1、第I階段:收起躺在水底的余鏈階段,電動(dòng)機(jī)軸上負(fù)載轉(zhuǎn)矩不變,且較小;
2、第Ⅱ階段:隨著懸鏈形狀的改變,軸上負(fù)載轉(zhuǎn)矩逐漸增大,直到錨破土;
3、第Ⅲ階段:負(fù)載轉(zhuǎn)矩達(dá)到最大,“出土”后突然減小;
4、第Ⅳ階段:收錨出水,隨著錨鏈長(zhǎng)度減小,負(fù)載轉(zhuǎn)矩逐漸減小;
5、第V階段:收錨入孔,是將錨拉入并緊固于錨鏈孔中,負(fù)載轉(zhuǎn)矩再次有所增大,但不多。

應(yīng)急起錨工況:
1、海事局定義:深水拋錨時(shí),由于水深錨拋不到底,需將錨拉起,找合適地方再拋。因?yàn)殄^鏈最長(zhǎng)(約200米左右),此時(shí)起錨負(fù)載轉(zhuǎn)矩最大2、一般定義:在電動(dòng)機(jī)熱繼電器動(dòng)作后,由于情況緊急通過(guò)應(yīng)急起錨按鈕短接熱繼電器進(jìn)行的起錨。
拋錨工況:
船舶拋錨時(shí)有兩種情況:
(1)水深不大時(shí),直接松開(kāi)制動(dòng)器,錨自由下落,靠錨和錨鏈自重 進(jìn)行拋錨;
(2)海水較深時(shí),則錨自由下落的速度較大,為了較好地控制下落速度也為了防止起錨困難和損壞設(shè)備,應(yīng)該采取電氣制動(dòng)的方法,使錨下落的速度恒定。
電氣制動(dòng)的方法有:
(1)能耗制動(dòng);
(2)再生(回饋、發(fā)電)制動(dòng)。
1、在錨機(jī)和絞纜機(jī)的控制系統(tǒng)中應(yīng)設(shè)置自動(dòng)逐級(jí)延時(shí)起動(dòng)電路和應(yīng)急保護(hù)電路。
2、電動(dòng)機(jī)應(yīng)具有足夠大的過(guò)載能力,應(yīng)能滿足任何一種起錨狀態(tài)所需要的最大轉(zhuǎn)矩,并且能在最大負(fù)載力矩下起動(dòng)(在30min內(nèi)允許起動(dòng)25次)。
3、電動(dòng)機(jī)在堵轉(zhuǎn)情況下能承受堵轉(zhuǎn)電流時(shí)間為1min(堵轉(zhuǎn)力矩為額定力矩的兩倍),在堵轉(zhuǎn)時(shí),對(duì)直流而言,應(yīng)能使電動(dòng)機(jī)自動(dòng)轉(zhuǎn)到人為機(jī)械特性上運(yùn)行,對(duì)交流而言,應(yīng)能自動(dòng)轉(zhuǎn)換到低速運(yùn)行。
4、為滿足必須的起錨速度和拉錨入孔時(shí)的低速,要求電動(dòng)機(jī)有一定的調(diào)速范圍,一般要求在5:1~3:1。
5、在電動(dòng)拋錨時(shí),由于是位能性負(fù)載,所以要求控制系統(tǒng)必須具有穩(wěn)定的制動(dòng)拋錨功能,勻速拋錨。
6.電動(dòng)機(jī)起動(dòng)次數(shù)不宜過(guò)于頻繁,應(yīng)能連續(xù)工作30min,且要滿足 30min內(nèi)起動(dòng)25次的要求。
7.采用電氣和機(jī)械聯(lián)合制動(dòng),以便滿足快速停車及系纜時(shí)具有輕載高速性能。
8.電力拖動(dòng)裝置應(yīng)能滿足在給定航區(qū)內(nèi),單錨破土后,能收起雙錨。
9.電動(dòng)液壓錨機(jī)來(lái)應(yīng)具有獨(dú)立的電動(dòng)機(jī)驅(qū)動(dòng),其液壓管路應(yīng)不受其它甲板機(jī)械的管路影響。鏈輪與驅(qū)動(dòng)軸之間應(yīng)裝有離合器,離合器應(yīng)有可靠的鎖緊裝置;鏈輪或卷筒應(yīng)裝有可靠的制動(dòng)器,制動(dòng)器剎緊后應(yīng)能承受錨 鏈斷裂負(fù)荷45%的靜拉力;錨鏈輪上必須裝有止鏈器。
目前國(guó)內(nèi)錨機(jī)的新控制方式:
(1) 用PLC實(shí)現(xiàn)繼電邏輯的升級(jí),其它基本不作太大的設(shè)計(jì)改變,電機(jī)調(diào)速還保留傳統(tǒng)的雙速或三速,非無(wú)級(jí)調(diào)速形式。
(2) 采用PLC為控制核心,交流變頻調(diào)速器進(jìn)行速度控制能夠?qū)崿F(xiàn)無(wú)級(jí)調(diào)速;這后一種情況目前已經(jīng)逐漸成為主流。
05、錨機(jī)的自動(dòng)控制技術(shù)發(fā)展方向
1、新的控制方式相比傳統(tǒng)的控制方式能夠大幅度提高了安全可靠性,維護(hù)維修工作大幅度減少,操作更加人性化。
2、PLC本身具有很高的無(wú)故障率,提高了系統(tǒng)的安全可靠性,維護(hù)查找故障也非常方便,且采用PLC與變頻調(diào)速器相結(jié)合的控制方式更能充分發(fā)揮變頻調(diào)速器本身的多功能調(diào)速特點(diǎn),在硬件線路上較為簡(jiǎn)單的實(shí)現(xiàn)了雙速、三速調(diào)節(jié)。而讀取有關(guān)的設(shè)備運(yùn)行參數(shù),如轉(zhuǎn)速、電流、電壓等也變得極為方便,方便檢測(cè),顯示參數(shù)。
3、經(jīng)濟(jì)性方面考慮,采用變頻調(diào)速和 PLC等智能化為核心的部件設(shè)計(jì) 制造的系統(tǒng)無(wú)疑要大于一般常規(guī)的繼電邏輯系統(tǒng)。但對(duì)深水,大功率錨機(jī)控制來(lái)說(shuō),一般的繼電邏輯并沒(méi)有優(yōu)勢(shì)可言。綜合考慮性能價(jià)格比,采用變頻調(diào)速的優(yōu)勢(shì)明顯。目前,行業(yè)內(nèi)多數(shù)用戶對(duì)深水和大功率錨機(jī)的控制都傾向于采用PLC+變頻調(diào)速系統(tǒng)的設(shè)計(jì)思想。
總結(jié):
庫(kù)馬克ES580驅(qū)動(dòng)器在船舶錨機(jī)上解決了低頻輸出力矩不夠,遇到復(fù)雜海域的情況負(fù)載突變而導(dǎo)致報(bào)警以及溜鉤不穩(wěn)的現(xiàn)象。
實(shí)現(xiàn)了:
1. 零速松閘,抱閘,啟停穩(wěn)定;
2. 低頻大力矩輸出,穩(wěn)速運(yùn)行后電流最小化;
3. 響應(yīng)速度快,大轉(zhuǎn)矩啟動(dòng),能較好的抑制振動(dòng)現(xiàn)象;
4. 高過(guò)載能力,突升突降不易引起報(bào)警;
| *登錄名: |
|
| *圖片驗(yàn)證碼: |
|